The possibilities for data acquisition in the last 20 years have changed dramatically, as well as the possibilities for data storage (from 1MB memory in PCMCIA cards in the early 90s to the microSDHC cards with even 1TB of memory). This huge growth opened a new chapter in the measurement and survey worlds. We are no longer limited to just picking single, characteristic points. Now we can store the whole geometry, not only of the single objects (i.e. buildings) but of entire cities and countries with their digital terrain models.
With such powerful storage capabilities, the challenges are how do you provide faster and more reliable deliverables, and how do you gather large amounts of the data in the shortest possible time. LiDAR and photogrammetry technologies were the best candidates. Both hardware and software have noticed significant improvements, allowing you to gather point clouds or photos faster and automatically register scans or process aerotriangulation.
What are the differences between point cloud and 3D reality mesh?
A point cloud is a discrete mathematical representation of the object. Millions of high density points stored together, sometimes with additional information, and which can represent even the most accurate and detailed geometry (depending on the use and scale). Built-in cameras, color or even thermovision can be also added to give additional information to the point cloud.
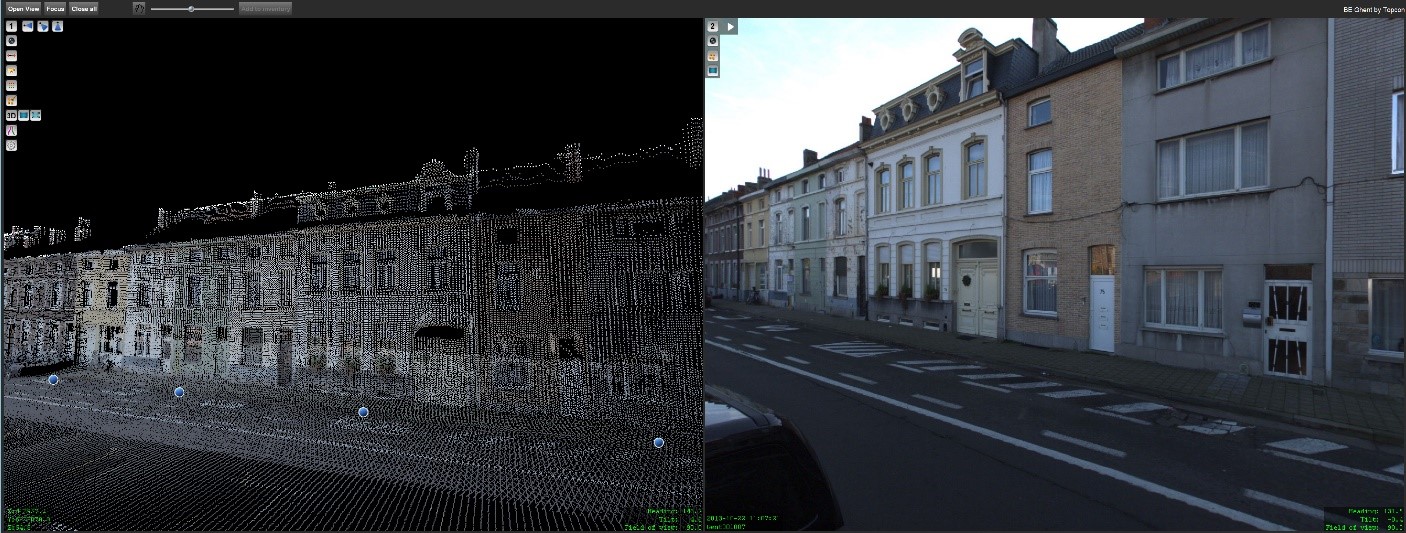 Point cloud view in the Orbit, in this example, photos are also available to help with the object recognition
Point cloud view in the Orbit, in this example, photos are also available to help with the object recognition
The advantage of the point cloud is that each scan position can be treated as a product ready to be measured, since it is directly collected from the surrounding geometry. That gives us some flexibility when it comes to the limitations such as accessible space to walk or light (laser scanners operate in the infra-red band). With proper measurements, we can join two scan positions place a long distance from each other. Also – laser scans will always win over photogrammetry in case of scanning flat and smooth surfaces (but not reflective ones – reflectiveness will cause problems in each of those technologies).
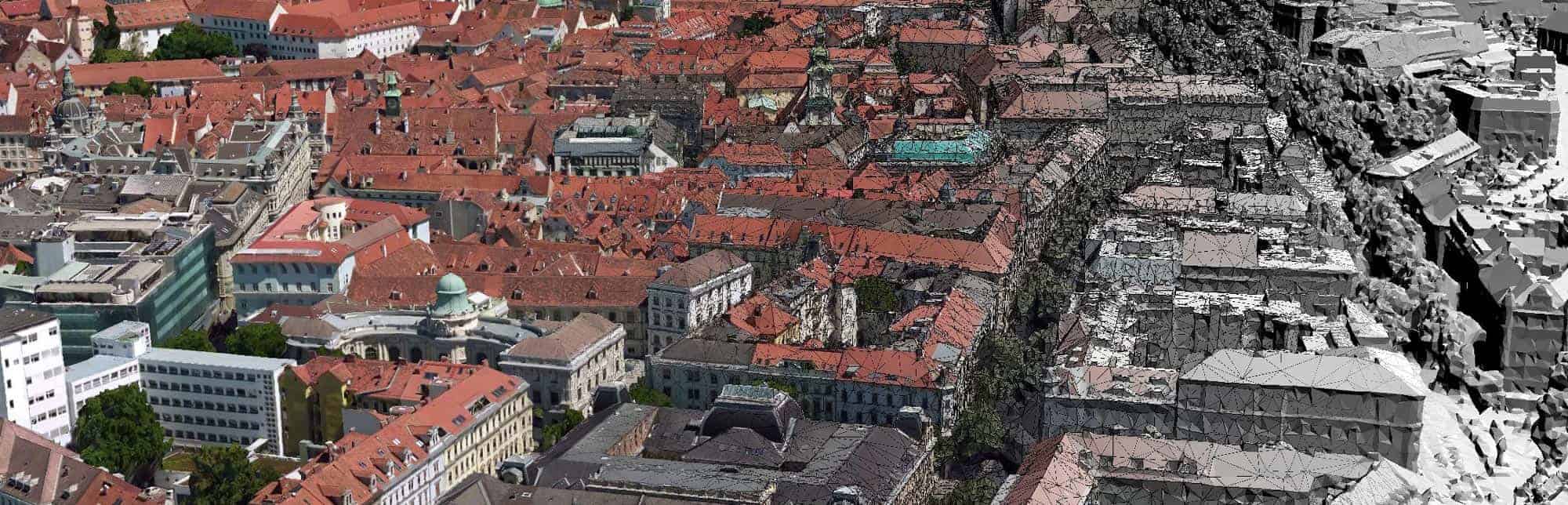
 Example of the reality 3D mesh, perfect use for the infrastructure objects
Example of the reality 3D mesh, perfect use for the infrastructure objects
On the other hand, if we need to scan a large area in a short time (and with limited budget), then photogrammetry is the best approach. Photogrammetry allow to get the result as a ready-to-use 3D model right away after the processing of the data. The cost of drone systems, even advanced ones, is much lower than the cost of an average laser scanner.
Another key advantage of aerial photogrammetry is the capture from a higher elevation, which allows higher accuracy and level of detail of vertical assets, such as telecom towers or church belfry.
Additionally, there is also no possible way for the scan data to beat photogrammetry in the quality of the texture of the 3D mesh. Even with the dense and colored point cloud and advances in mesh-from-point generation, the results won’t be even comparable to the proper photogrammetry deliverable.
 Simplified graphic for the Reality Modeling Advanced WorkSuite
Simplified graphic for the Reality Modeling Advanced WorkSuite
Which one should I choose? And my answer is, why not both?
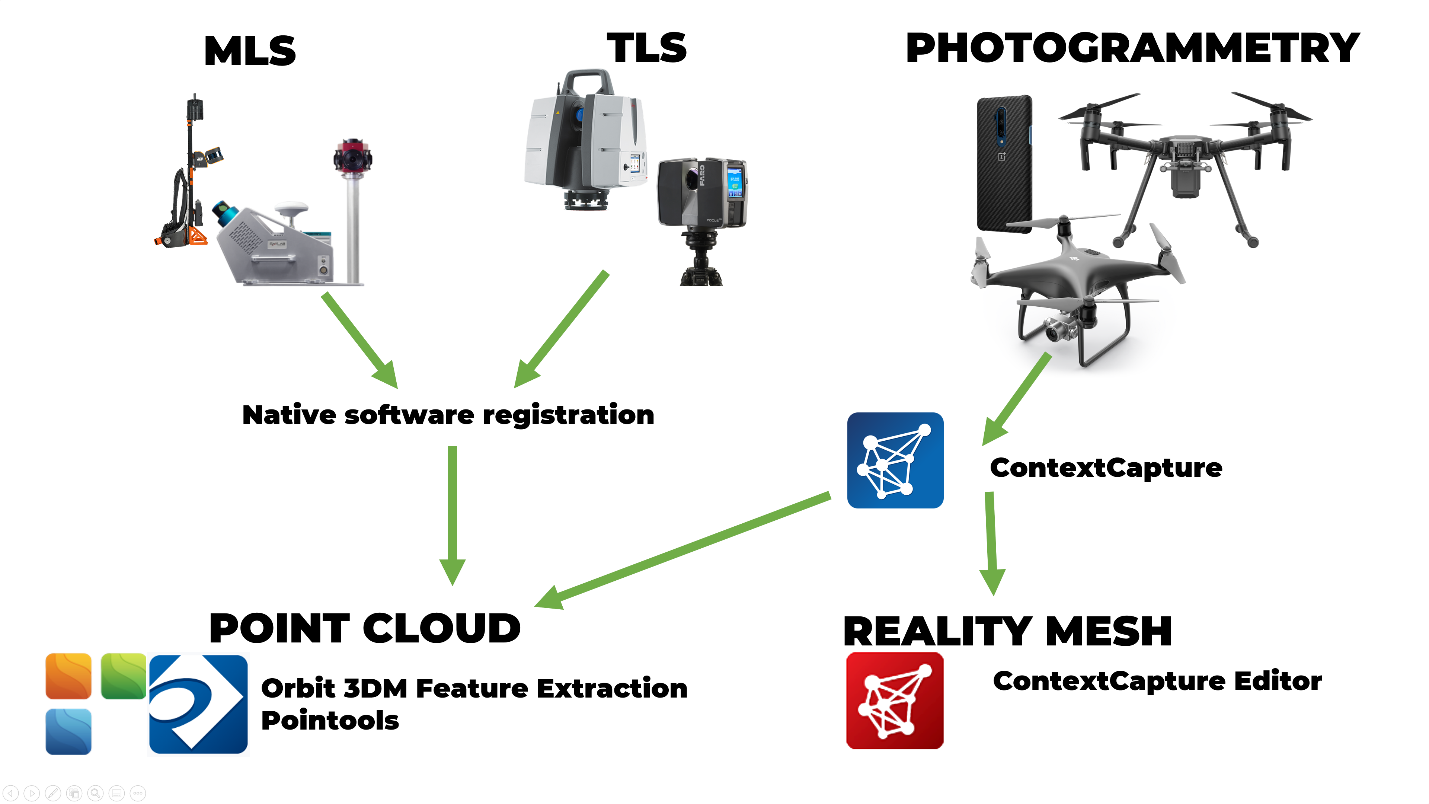
Bentley’s eStore provides end-to-end solutions to cover all your Reality Modeling needs:
ContextCapture allows you to merge the geometrical accuracy of the point clouds together with the unbeatable texture of the photogrammetry! What we call a hybrid 3D mesh.
With Orbit 3DM Feature Extraction you can visualize and analyze registered point clouds, and much more. It can read multiple sources of data (including GIS, photos, shapes and point clouds) and apply a wide variety of advanced measurements, and extract automatically features such as edges, trees and many different objects (with use of built-in detectors).
Finally, data from both ContextCapture and Orbit 3DM Feature Extraction can be imported into ContextCapture Editor, our MicroStation based software, which allows to analyze reality meshes, extract information from them (such as terrain model, classified point cloud of the ground or contour lines) and perform vectorization or 3D modelling on each of the data sources.
All our solutions come with dedicated support and training that will help you in every step of the journey with Bentley’s eStore. Whether you are looking into a complex project or you are new to Reality Modeling, we got you cover!
Have a look at our live chat here: