At Bentley, we are constantly inspired by the innovative ways our technology is used to tackle the world’s challenges. Today, we are thrilled to spotlight a group of exceptional students from Louisiana State University (LSU) who attended the Digital Twin...
A director at a state department of transportation faces a nine-figure change order for a complex highway interchange. The evidence is a 500-page report and a set of 3D renderings that are already two weeks out of date. The team...
Almondz unified terabytes of mixed LiDAR lidar and drone imagery—using iTwin Capture to cut 3D reconstruction time by 40%, reduce rework by 35%, and lay a resilient digital twin foundation for Gujarat’s smart cities....
In a recent episode of Power Perspectives, the Energy Central podcast exploring the challenges and innovations shaping today’s grid, Otto Lynch, VP, Head of Power Line Systems at Bentley Systems joins the conversation to unpack one of the industry’s most...
As the summer of football brings millions of visitors to North American host cities, see how OpenRoads Designer 2026 supports road, corridor, terrain, and transportation design....
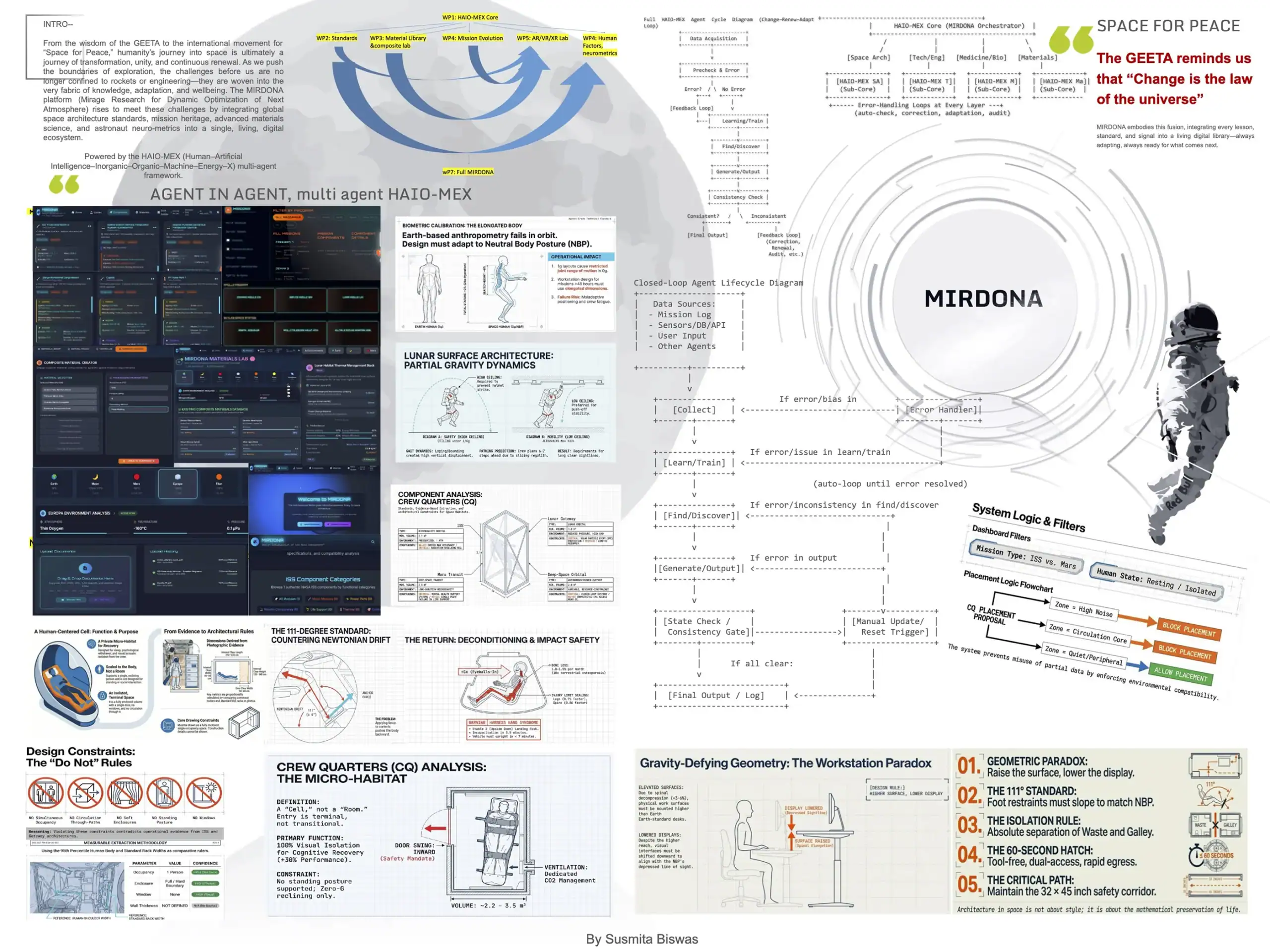
Over the past years, I’ve been living in two parallel worlds One defined by the pace of generative AI through formal study, constant experimentation, and the sensation of watching a field rewrite itself in real time. The other one is...